 |
1ère année
|
Régulation Servomoteur
|
| Introduction |
|
Durant la formation ES de technicien en systèmes industriels nous devons réaliser un projet qui s'étend sur les deux semestres de la 1ère année. Ce travail s'effectue en dehors des heures de cours. Selon le plan d'étude, nous avons à disposition un minimum de 280 périodes pour mener à bien notre projet. A la fin du second semestre, nous devons pouvoir présenter une machine fonctionnelle qui sera ensuite notée par nos enseignants pour valider notre module.
Normalement ces travaux sont faits par groupe de deux étudiants. Mais ce projet devait être réalisé de manière individuelle. |
| Description |
| Le cahier des charges pour ce banc de test était de concevoir un module didactique pour les étudiants de 2ème année ES. Il doit leur permettre de s'exercer à la régulation et au positionnement de servomoteurs. La contrainte principale était d'utiliser du matériel Beckhoff. Nous avions à disposition un PC industriel, deux cartes d'axes et deux servomoteurs. Le but étant de pouvoir se familiariser avec un nouveau type d'automate durant la 2ème année de formation. |
| Principe de fonctionnement |
|
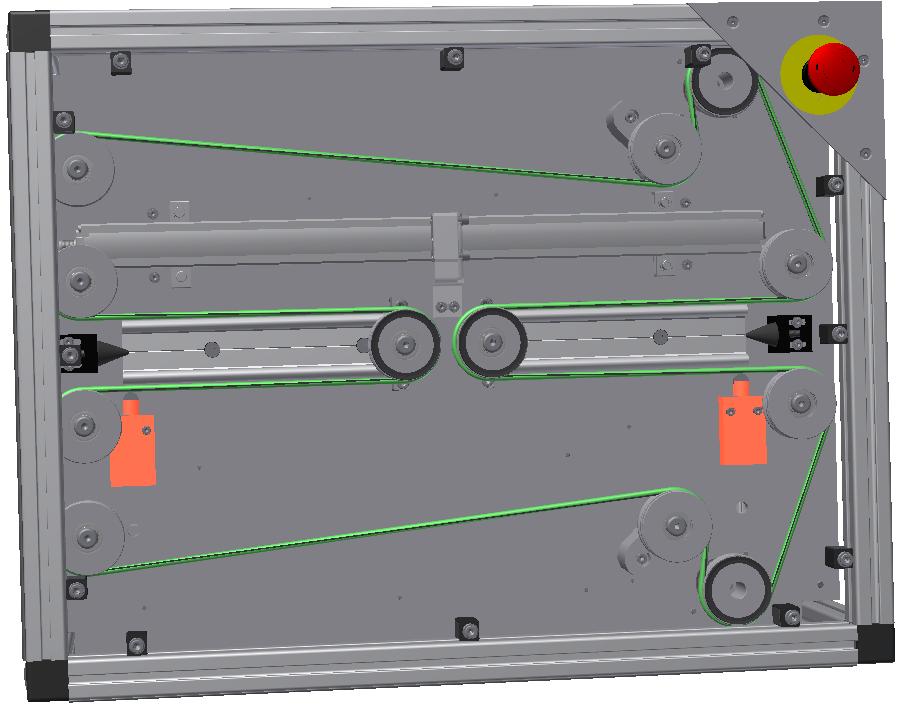
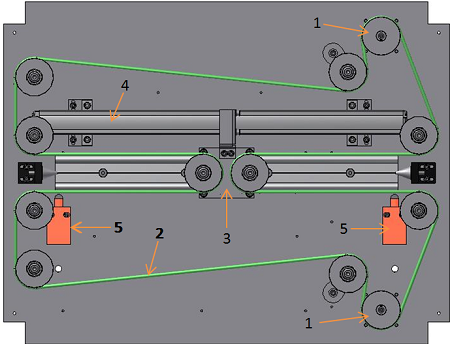
Le principe de fonctionnement de ce banc de test est assez simple. A l'aide des deux poulies d'entraînements montés sur les servomoteurs (1), nous allons faire tourner la courroie (2). Celle-ci est soit ronde, soit plate avec un double crantage. Cela pour pouvoir comparer les effets des compensations de régulation dûs aux glissements de la courroie sur les poulies. Afin de pouvoir visualiser la différence de vitesse entre les deux moteurs, nous avons placé un élément mobile (3) sur un rail. En effet, si les servomoteurs ne tournent pas à la même vitesse, l'élément mobile va se déplacer à droite ou à gauche du rail. Pour connaître la position exacte du mobile et ainsi permettre la régulation des moteurs, nous utilisons une règle linéaire (4) de chez Balluf. Pour la sécurité de la station, nous avons placé des capteurs de fin de course (5) de chaque côté. Si le mobile entre en contact avec l'un des fins de course, cela va créer un arrêt rapide des moteurs.
|
| Visualisation |
|
Afin de permettre aux utilisateurs de voir l'état des différentes entrées-sorties nous avons réalisé une visualisation sur PLC Control. Il est possible d'afficher la vitesse des deux moteurs, la position du mobile, l'état des fins de course, de l'arrêt d'urgence, le relais de sécurité et du contact de sécurité.
Etant donné qu'il n'y a aucun bouton physique sur la machine mise à part l'arrêt d'urgence, nous avons placé des boutons "Start", "Reset" et "Stop" pour pouvoir passer entre les différents états de la machine.
Les futurs utilisateurs pourront apporter les améliorations qu'ils souhaitent pour être en relation avec la programmation qu'ils auront effectuée.
|

|
CX5020
PC industriel utilisé pour le contrôle du banc de test. |
|
EL7201-0010
Carte d'axe utilisant la nouvelle technologie pour les moteurs monocables |
|
AM8121-0F20
Moteur synchrone 50VDC - 4A |
|
Règle Balluf
Capteur de position BTL6 permettant de connaître la position de l'élément mobile. |
|
Rail Igus
Rail DryLin W supporte l'élément mobile. Les forces de frottement sont réduites afin de ne pas influencer la régulation |




