 |
Trieuse de visT1311-Station 1Tri en fonction des têtes de visTravail réalisé par Yannick Gumy___________________________________________________________________________ | |||||
IntroductionDans le cadre de notre formation de Technicien ES en systèmes industriels, nous avons un travail de semestre à réaliser. Il consiste à concevoir une maquette qui, dans notre cas, permet de trier des vis en fonction de leurs têtes.
Selon le cahier des charges de ce projet, un automate et un touch panel de la marque Siemens ainsi qu'une caméra de vision sont imposés. ___________________________________________________________________________ | |||||
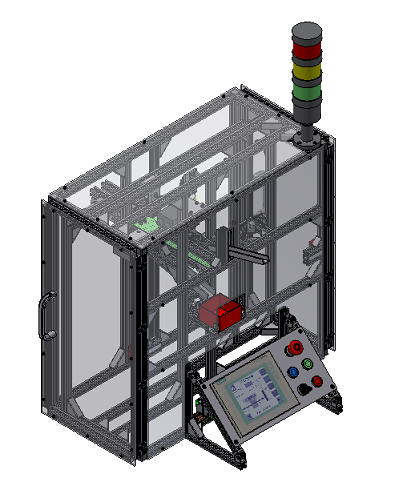
Vue générale de la station
La station a été modélisée avec le programme Autodesk Inventor___________________________________________________________________________ | |||||
Fonctionnement de la stationLes vis sont posées manuellement sur un toboggan. Un vérin avec un ressort au bout de la tige permet de faire un "dosage" de vis.
Toboggan d'entrée
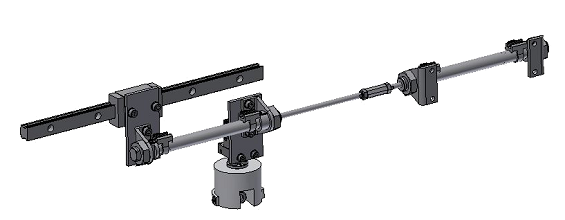
Animation du dosage des visLa vis tombe sur un tapis qui l'emmène sous une caméra de vision. Son but est de détecter la forme de la tête de la vis et son sens. Ensuite un système d'aiguillage permet de séparer les vis à tête conique de celles à tête cylindrique ainsi que de mettre les vis dans le sens voulu. Il permet également d'éjecter de la machine les vis sans tête. Il est composé de 2 vérins "double-effet" permettant la séparation des vis et d'un vérin rotatif qui retourne les vis dans le sens souhaité.
Modélisation de l'aiguillage
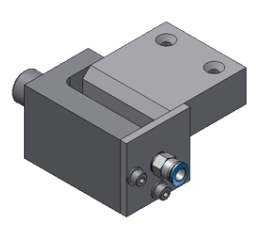
Animation de l'aiguillageLes vis à tête conique et cylindrique sont ensuite envoyées à la station suivante à l'aide de "canons" à vis conçus exprès pour cette application. Le transfert des vis se fait avec des tubes reliés aux "canons".
Modélisation d'un canon à vis
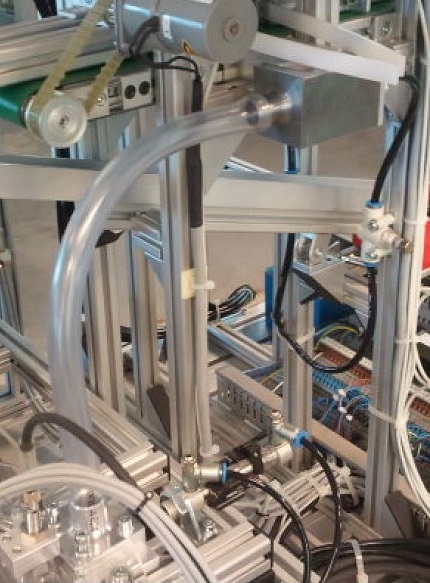
Transfert des vis à la station 2 grâce à des tubes___________________________________________________________________________ | |||||
Caméra de vision
Caméra de chez Baumer, VSCS100M03W10EPUne caméra de vision est imposée pour ce travail. Quand une vis est présente sous la caméra, elle prend une photo. Elle mesure ensuite les contours de l'image et envoie à l'automate l'une des informations suivantes :
Si la caméra ne donne pas de résultat à l'automate alors qu'une vis est présente, cette dernière est envoyée dans un bac de récupération. | |||||



Réalisé par :
Yannick Gumy |