 |
Trieuse de pièces en fonction de la hauteurRéalisé par Cyril Castella et Stefano Canessa en 2012 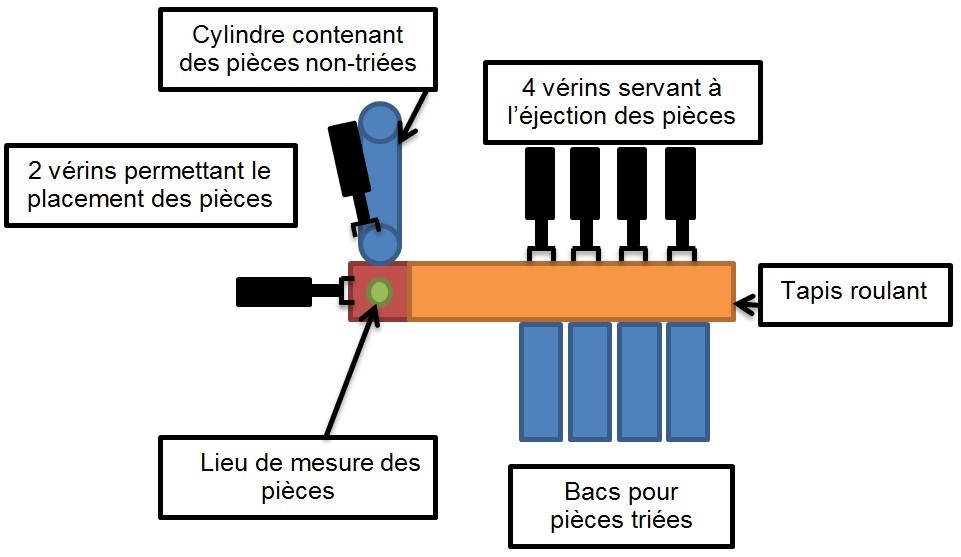 Nous allons vous faire découvrir notre projet du 2ème semestre que nous avons dû faire pendant la première année de la formation de technicien en systèmes industriels. Nous avons décidé de réaliser une maquette qui a pour but de trier des pièces de différentes hauteurs. Fonctionnement:La commande de notre maquette est gérée par un automate programmable industriel de la maison Siemens (CPU 314 IFM). Les ordres de l'utilisateur sont donnés à l'aide d'un écran tactile (touch panel TP170A) de la même entreprise. Dans un premier temps une pièce est éjectée du cylindre puis elle est mesurée par le capteur de distance. Une fois cette opération effectuée, la pièce est poussée sur le tapis roulant pour être éjectée dans le bac correspondant à sa taille. Nos pièces sont de 4 tailles différentes qui vont de 10mm jusqu'à 13mm, il y a entre chaque taille de pièce une différence de 1 mm. Description:Notre maquette comporte 5 parties :
La structure mécanique est composée majoritairement de composant Item dans le but de limiter le nombre de pièces mécaniques à usiner.
Notre maquette comporte 2 platines de commande. Une platine pour le matériel électrique (Un automate CPU 314 IFM, une alimentation à découpage, des bornes et un relais) et une autre pour le matériel électropneumatique (un conditionneur et 6 distributeurs 5/2).
Ce panneau nous permet de commander la maquette. Il se compose d'un écran tactile HMI de Siemens, un bouton d'arrêt d'urgence et d'un pressostat numérique.
Cette partie nous permet d’emmagasiné des pièces cylindriques avant leur déplacement vers la zone de mesure puis vers la zone de tri. Elle se compose d’une pièce mécanique conçue pour que l’on puisse éjecter une pièce après l’autre, de deux vérins qui servent au déplacement des pièces et d’un capteur de distance laser qui nous permet de savoir l'épaisseur des rondelles et donc de les trier par taille.
La dernière partie permet de déplacer les pièces vers leur zone de stockage final respective. Les rondelles sont stockées dans 4 bacs différents selon leur taille. Les quatre zones de stock se composent chacune d'un vérin d'éjection, de capteurs pour leur éjection et d'une rampe de stockage. |

alimentation à découpage

CPU 314IFM

Capteur courte distance laser 4-20mA

Capteur photoélectrique

Colonne lumineuse

Touch panel

distributeur 3/2

vérin pneumatique